
触覚手袋による手の人間工学の定量化
はじめに
Musculoskeletal disorders (MSD) are injuries or disorders of the muscles, nerves, tendons, joints and cartilage. Work-related musculoskeletal disorders (WMSD) are conditions caused, prolonged or made worse by work conditions.
Ergonomics / human factors considers the interaction between humans and other parts of a system. A goal of ergonomics is to reduce stress and eliminate injuries and disorders associated with the overuse of muscles, bad posture, and repeated tasks. A workplace ergonomics program can aim to prevent or control injuries and illnesses by eliminating or reducing worker exposure to WMSD risk factors using engineering and administrative controls. Risk factors include awkward postures, repetition, material handling, force, mechanical compression and duration of exposure.
There is strong evidence that job tasks that require a combination of risk factors (e.g., highly repetitious, forceful hand/wrist exertions) increase risk for hand/wrist tendinitis. Fifty percent of industries reported work-related musculoskeletal disorders (WMSD) rely heavily on the use of hand tools.
さまざまなタスクで手にかかる力と努力をよりよく理解することで、次のことが可能になります。
より良い製品を設計するための人間工学エンジニア
臨床医は、特定の職業に必要な手の強さを理解し、
安全作業条件の基準を指定する安全規制当局。
The PPS タクタイル手袋 enables the capture of natural high-resolution, dynamic, pressure mapping data to fully understand hand interactions.

バックグラウンド
最近まで、手の力の分布を測定するために利用できるツールは限られていました。これらは、図1に示すように、ハンドダイナモメーター、ピンチゲージ、およびプッシュ/プルフォースゲージに限定されています。


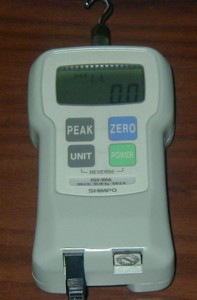
Figure 1 Traditional methods of hand force measurement (a): hand dynamometer, (b) pinch gauge, (c) push/pull force gauges.
これにより、英国健康安全局などの政府規制当局が、軽度から中程度などの主観的な用語に依存する代わりに、許容可能な手力に明確な制限を設けることが困難になっています。
PPS TactileGloveは、再現性のある高解像度の動的触覚データの測定を容易にすることで、この問題を解決します。コンパクトなワイヤレス設計により、ユーザーがタスクを実行する際の障害が最小限に抑えられます。測定の再現性は、PPSの静電容量センシング技術を使用することで実現されます。


Figure 2. (a) The PPS TactileGlove being used for a task requiring god hand dexterity. (b) The inside of the TactileGlove showing the capacitive sensors.
圧力と触覚
触覚センシングは、表面全体、多くの場合、手のような複雑な表面全体の接触圧力のマッピングに関連しています。より頻繁に使用される「圧力」と「力」という用語は「触覚」に関連していますが、どちらも接触力学の完全な複雑さを捉えることはできません。 「圧力」は大きさのみをキャプチャするスカラー値であり、「力」は大きさと方向を表すベクトルです。触覚測定は、マトリックスとして表される領域全体の垂直抗力または圧力をプロットします。これを以下に示します。

Figure 3: Press, Force and Tactile illustration
努力の定量化
One factor that can be used to differentiate different tools is the total effort required for a process. We can define Effort (N.s) as the total force magnitude exerted by the hand over the task duration, and calculate it by summing the integral of all force measurements over time as shown below and illustrated in Figure 4.
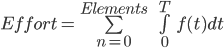
式1努力式。
一般的に、使いやすいツールはより少ない労力で済みます。
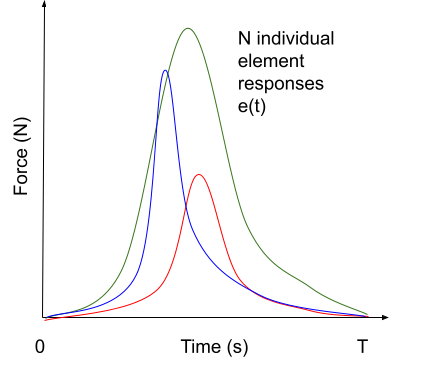
Figure 4: Effort is defined as the integral of total force over time, summed over all elements. So we add the area under each element curve.
ここで、カットとスプレッドの2つのツールの例を検討します。
例1:1” x 2”の木材を鋸で挽く
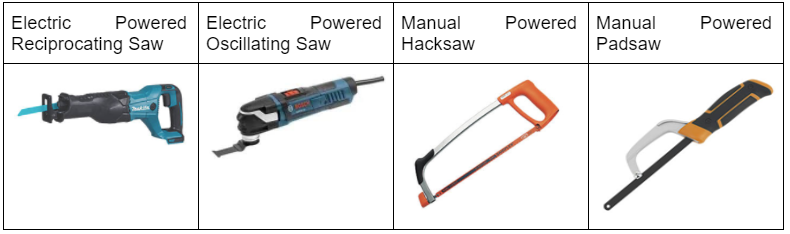
実例として、4種類ののこぎりを使用して、松の木の1” x 2”セクションを切断しました。
Tactile data from the TactileGlove is shown in Figure 5. There are two main views. The top view shows the pressure distribution at an instant in time, in this case during the use of the electric oscillating saw. Pressure is distributed mostly over the side of the index finger, base of the thumb and tips of the middle and ring fingers.
下のストリップチャートは、時間の経過に伴う各桁の最大圧力をプロットしています。右下のデータ分析ペインには、グローブによって測定された総力など、この瞬間の34 Nなどの主要な測定値の概要が表示されます。アクションと触覚を一致させるのに役立つWebカメラからの同期ビデオも表示されます。測定。
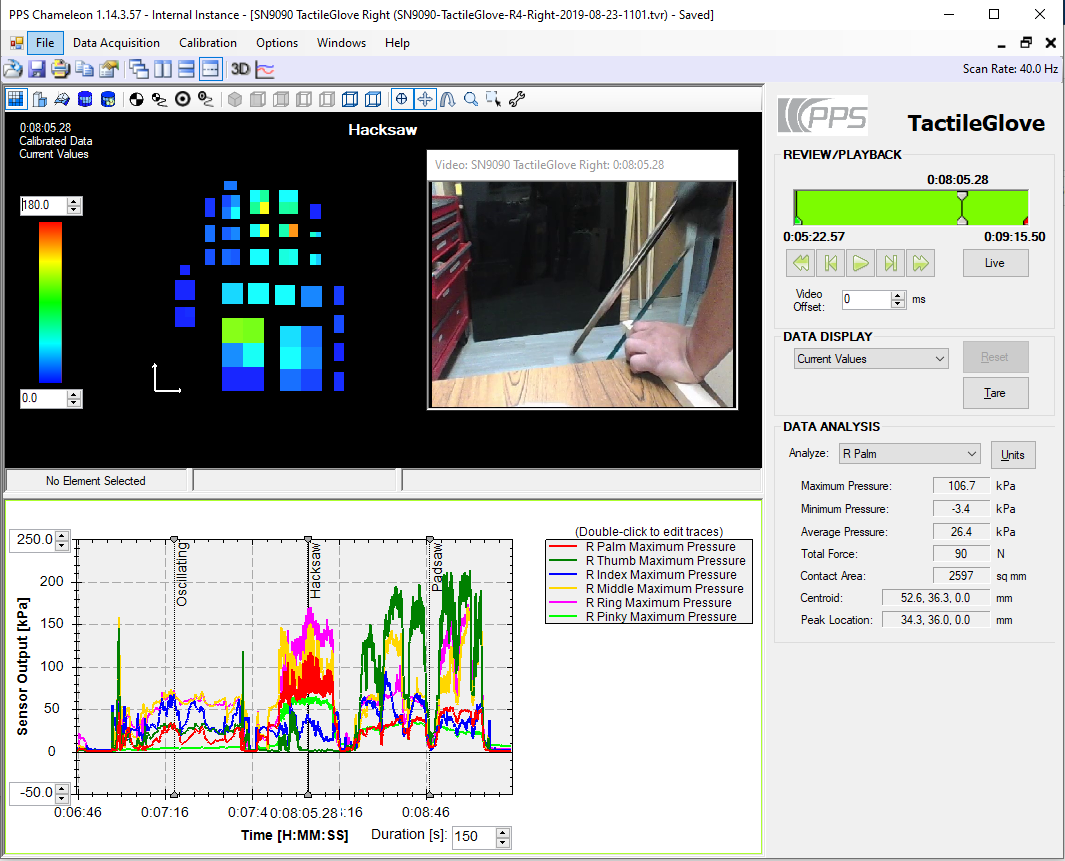
Figure 5: Example data captured by a PPS TactileGlove when sawing wood with several types of saw.
カメレオンでは簡単な分析ができます。たとえば、振動のこぎりで見ると、操作の開始時と終了時に圧力スパイクがあります。これは、硬いオン/オフスライドスイッチを押した結果です。各桁によっ加えられた総力を確認し、圧力の同意を探すことができます。ストリップチャートの各要素の圧力および/または力の両方をプロットすることもできます。この場合、各桁の最大圧力を示しています。
より詳細な分析のために、データをcsvにエクスポートし、Excel、Matlab、または同等のもので処理します。
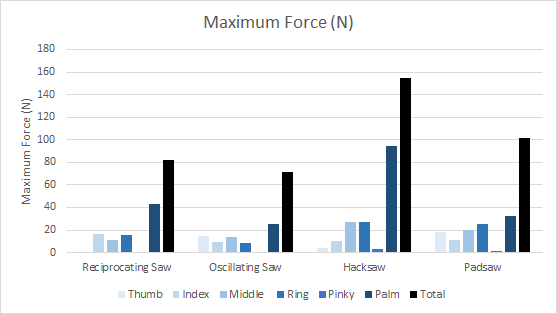
Figure 6: Maximum Digit Force
たとえば、図6は、各鋸タイプの各桁の最大合計力をプロットしています(振動鋸の切り替え力を除く)。弓のこは、主に手のひらに最大の力を発揮します。手のひらにかかる力は、指にかかる力よりも人間工学的である可能性があります。これらの力のレベルを、特定の指にかかる力に対して持つ可能性のある安全限界と比較できます。
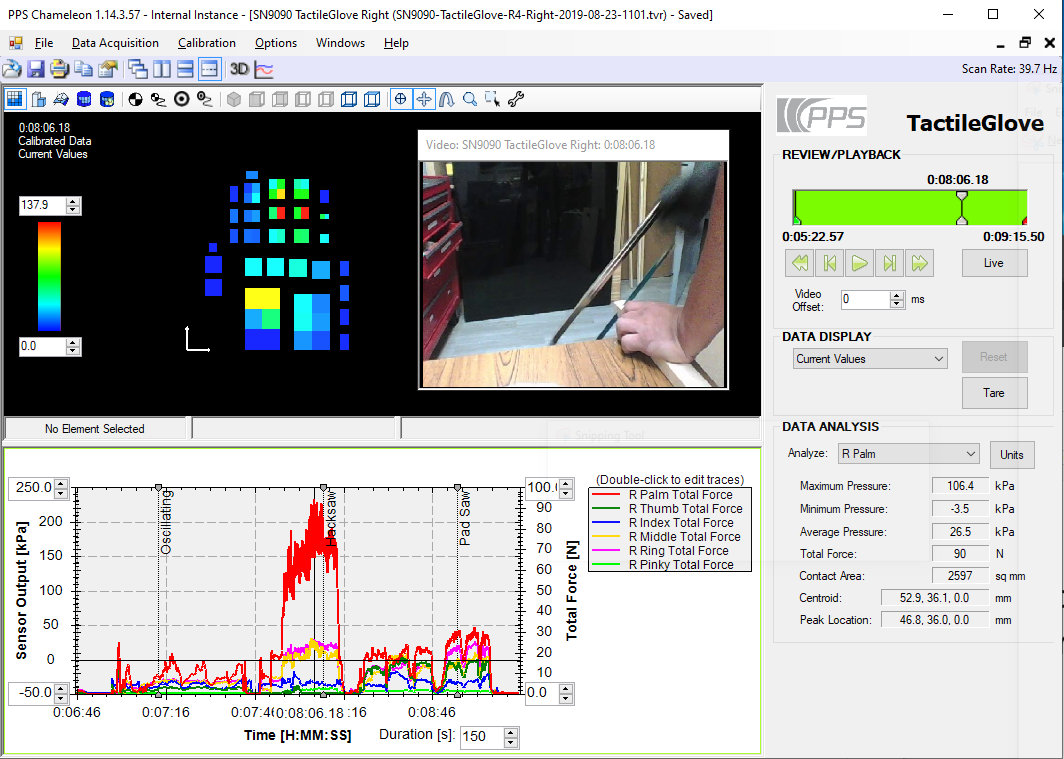
Figure 7: An example frame when sawing with the hacksaw. Total digit force is plotted in the strip chart.
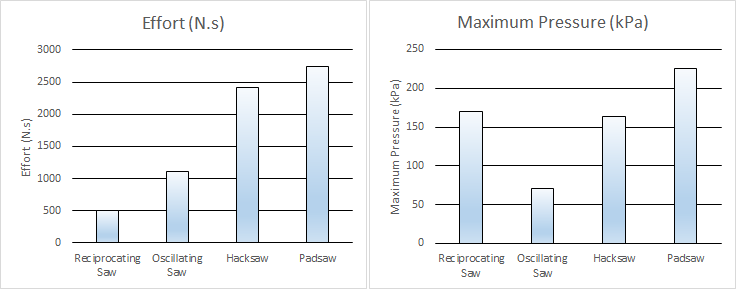
Figure 8: Left: Effort for each saw type as defined in Equation 1. Right Maximum pressure for each saw type
労力(図8)を考慮すると、手動のこぎりと比較した場合、パワーアシスト振動およびレシプロソーが労力を削減したことがわかります。パッドソーは特定の指に比較的低いピーク力を持っていましたが、長時間の力を必要とし、労力が増加しました。
Lastly, if we consider maximum pressure (Figure 9), we can see the pad saw provides peak pressure, over 200 kPa. Cross referencing with Figure 5 we can see this occurs on the thumb and ring finger, which may cause discomfort over prolonged periods.
次に、2番目の簡単な例を考えてみましょう。
例2:ハンドルの設計を広げる
Spreading is used extensively in gluing, sealing and painting. It makes extensive use of pinching, pulling and pushing motions. Lets consider the goal of optimising the hand ergonomics of the spreader design. The original spreader has a very thin handle, making it uncomfortable to use. Design 1 has a large hard handle. Design 2 has a large foam handle, most similar to a bicycle handlebar. All three spreaders have the same active area for spreading. The test subject was asked to spread a fixed volume of sealant for each test.

Figure 10: Original spreader, followed by two prototypes aiming to improve the design
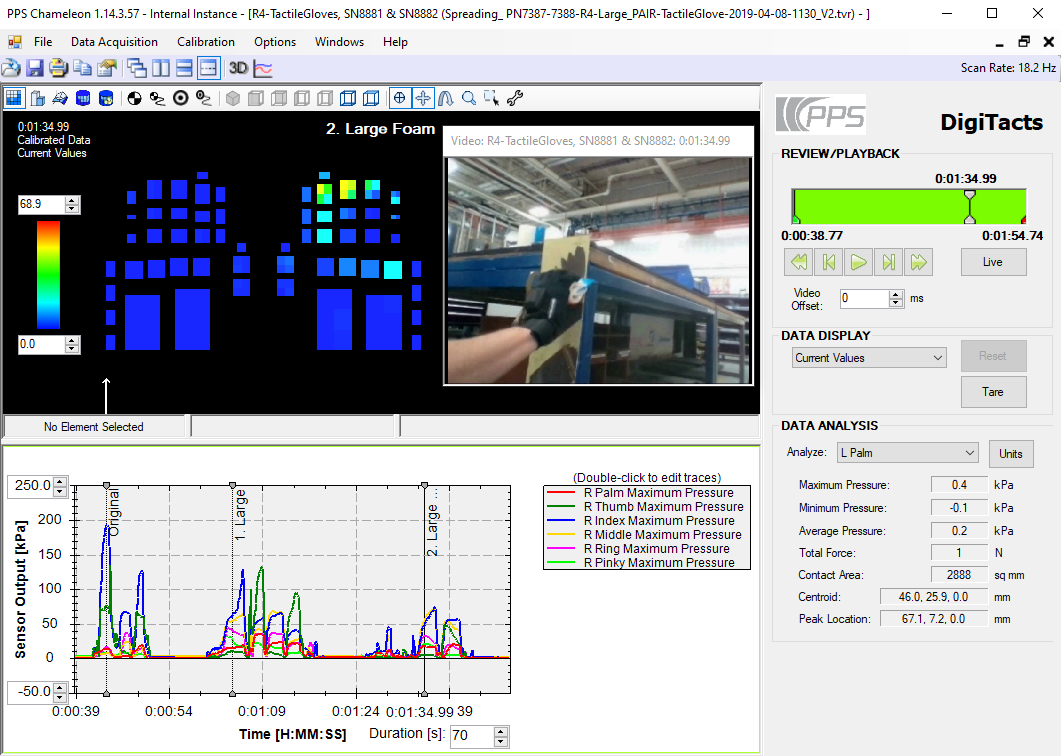
Figure 11: Example data captured by a PPS TactileGlove when using three different types of spreader.
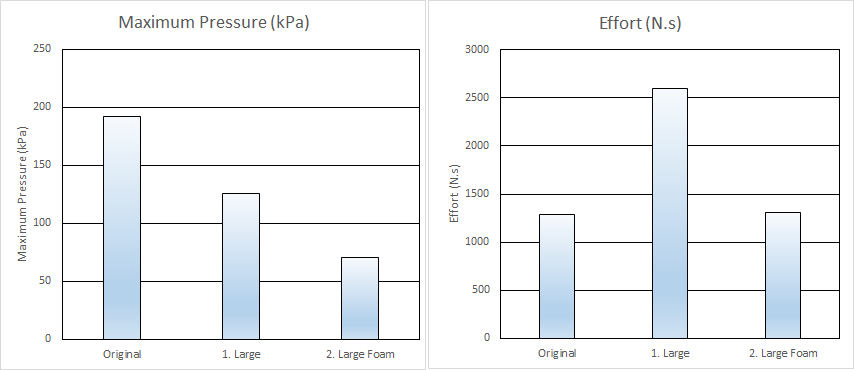
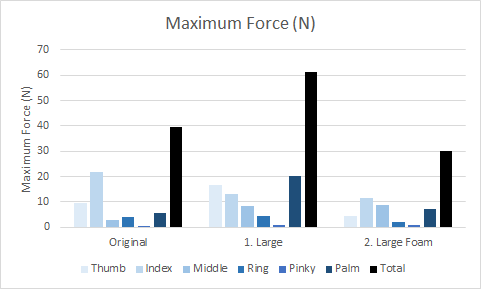
Figure 12: Plots of Effort, Maximum Pressure and Maximum Digit Force.
ツールを使用するには、2つの異なる力が必要です。最初にツールを保持するためのピンチ力、次にスプレッダーを動かすための横方向の力。より良いハンドル設計により、必要な挟み込み力を最小限に抑えることができます。横方向の力の大きさを変更することはできませんが、力が手に現れる場所を最適化することはできます。
図12の結果を検討することにより、両方のハンドル設計が、より大きな接触領域に負荷を分散することにより、オペレーターが経験する最大圧力を低減することがわかります。これにより、より快適に使用できるようになります。新しいデザインのハンドルは、より良いグリップを提供しながら、手全体に負荷をより均一に分散させ、ツールを保持するために必要なピンチ力を低減します。フォームはこの荷重をよりよく分散し、ピーク圧力と指の力をさらに低減します。
この場合、拡散などのタスク期間を制御するのが難しいため、エフォートプロットの解釈は簡単ではありません。
概要
This white paper has provided an overview of how the PPS TactileGlove can be used to quantify the ergonomics of hand tools and power tools. The concept of task effort was defined when considering human factors and ergonomics. The effort calculation clearly showed the reduced work required when using electric saws compared to hand saws. Digit force and peak pressures were also considered key design parameters and were used to clearly show the advantage of foam on a spreader handle. Hopefully, it is clear that none of the traditional tools outlined in Figure 1 provides a comparable insight into hand ergonomics.
詳細については、PPSの営業担当者にお問い合わせください。

Useful Reading and Support
Additional white papers for calibration/verification and application support can be found here:
WHITE PAPER - Interpreting TactileGlove Data for Practical Use Cases - Published 2024
WHITE PAPER - Calibrating and Verifying Tactile Pressure Sensors - Published 2018
SUCCESS STORY - Purdue Uni Research Project Assesses Lifting Injury Risks using PPS TactileGlove - 5月 2025
Details on TactileGlove specifications and intended use applications can be found here:
Force Measuring Sensor Glove | Grip & Hand Mapping
Pressure Mapping & Pressure Mapping Technology
Real examples of TactileGlove being used in research and development can be found here:
RESEARCH ARTICLE - Investigating Gripping Force During Lifting Tasks Using a Pressure Sensing Glove System - 2月 2023 - Purdue University - Download
RESEARCH ARTICLE - Identification of Adaptive Driving Style Preference through Implicit Inputs in SAE L2 Vehicles - 11月 2022 - Honda Research Institute USA, Inc - Download
RESEARCH ARTICLE (in Japanese) -Measurement and Assessment of Touch Skills during Dementia Care Movements Using Tactile Gloves - 2020 - Kyushu University